Intelligent Systems Project in touch with Robomantic, Citec Uni-Bielefeld
Get in touch with state of the art measurement devices for human interaction studies. µGlove -> multi modal sensing data glove
Use and evolve the toolchain for the next generation of haptic point cloud generation. This toolchain will be useful for haptic VR and human interaction studies, as for the training of robotic hands and prosthesis.
Pleas apply now via EKVV: https://ekvv.uni-bielefeld.de/kvv_publ/publ/vs?id=335006695
392283 ISY Project: Extension of a haptic point cloud by visual object tracking (Pj) (SoSe 2022) Find other projects by typing ISY in the seach field of ekvv for summer semester 2022
This ISY project is mainly led by Qiang Li from AG-Neuroinformatics.
Feel free to get in touch with Qiang, Julia, Leander or Gereon, gladly also before you register for this project. e.g. <gbuescher[at]techfak.uni-bielefeld.de>
Brief overview (EN) (DE below)
We are generating a point cloud of visual and tactile data that can be used to characterize objects. Currently, we use a multimodal tactile glove to scan (explore by touch) a spatially fixed object in a defined environment. Using the point cloud, where each point carries the information of a force vector, we can determine properties such as shape or stiffness of an object. As part of the ISY project, an extension of point cloud generation will take the form of object tracking using markers. This serves the ability to behave free and intuitive when exploring objects with the hand (and glove).
Required skills:
- Know how to do an Ecosia search.
- Having heard of ROS would be very helpful
- Knowing how to motivate yourself is not only advantageous for this project.
Kurze Übersicht (DE)
Wir erzeugen eine Punktwolke aus visuellen und taktilen Daten, die zur Charakterisierung von Objekten verwendet werden kann. Derzeit verwenden wir einen multimodalen taktilen Handschuh, um ein raumfixiertes Objekt in einer definierten Umgebung zu scannen (durch Berührung zu erkunden). Anhand der Punktwolke, bei der jeder Punk die Informationen eines Kraftvektors in sich trägt, können wir Eigenschaften wie Form oder Steifigkeit eines Objekts ermitteln. Im Rahmen des ISY-Projekts wird eine Erweiterung der Punktwolkengenerierung in Form einer Objektverfolgung mittels Markern erfolgen. Dies dient dazu, sich beim Erkunden der Objekte mit der Hand (und dem Handschuh) intuitiver und freier verhalten zu können.
Wünschenswerte Kenntnisse:
- Wissen, wie man eine Ecosia-Suche durchführt.
- Von ROS gehört zu haben, ist sehr hilfreich.
- Zu wissen, wie man sich selbst (und seine Mitmenschen) motivieret, ist nicht nur für dieses Projekt von unermesslichem Wert.
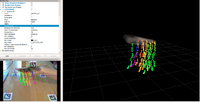
ROS Visualization [Source: Julia Niermann]